Program the robot
Poppy robots are designed to be easily programmed. They are three main options presented here:
- using Scratch, a visual programming language,
- using Snap!, a variant of Scratch the visual programming language,
- using Python and leveraging the power of the whole API,
- through the REST API which let you interface Poppy robots with other devices or any programming language.
Info: As for the rest of the project, all our software libraries are open source (GPLv3 License) and available on GitHub.
Using Scratch
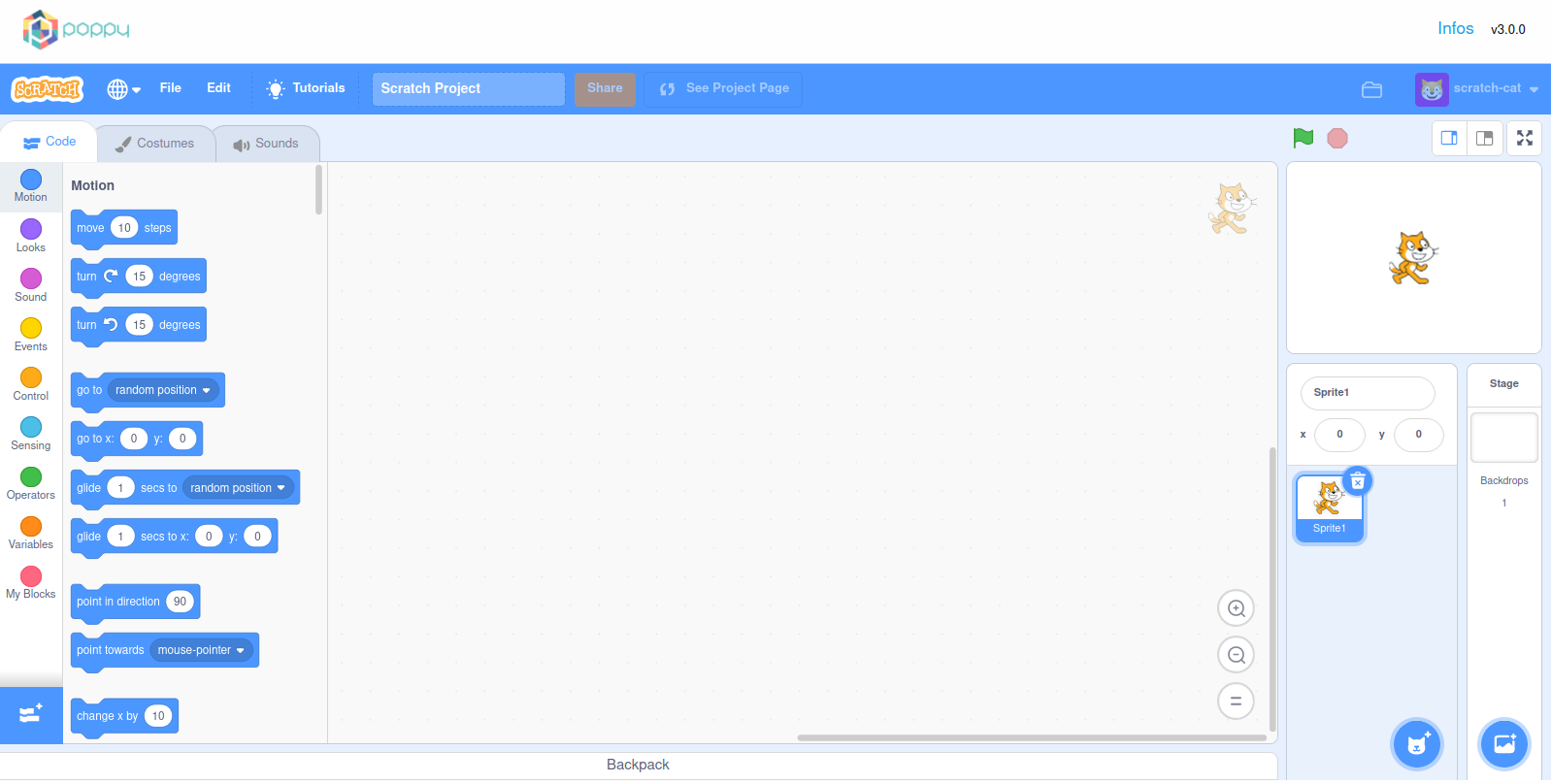
Scratch is a visual programming language. It is a block based drag-and-drop programming language that allows for a thorough introduction of IT. It runs in your browser as it is implemented in JavaScript. You do not need to install anything to start using it. It is open sourced and actively maintained.
We developed a set of custom blocks for Poppy robots that let you send motor commands and read values from the sensors of your robot. This let you to directly jump into controlling and programming your robot without any syntax/compilation issue. Thanks to Scratch live interaction loop you simply have to click on a block to send its associated command to the robot. Scratch also naturally scales to more complex projects.
A dedicated chapter will guide you in what you can do with Scratch and Poppy robots.
Using Snap!
![]()
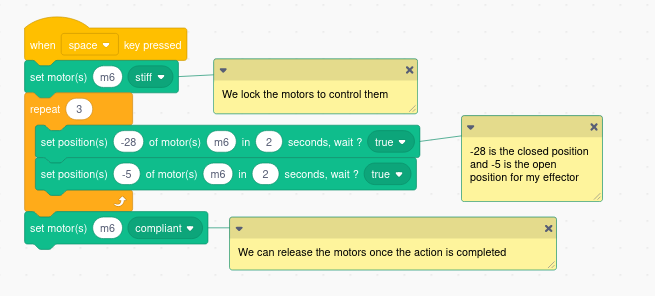
Snap! is a visual programming language - a variant of the very famous Scratch language. It is a block based drag-and-drop programming language that allows for a thorough introduction of IT. It runs in your browser as it is implemented in JavaScript. You do not need to install anything to start using it. It is open sourced and actively maintained.

We developed a set of custom blocks for Poppy robots that let you send motor commands and read values from the sensors of your robot. This let you to directly jump into controlling and programming your robot without any syntax/compilation issue. Thanks to Snap! live interaction loop you simply have to click on a block to send its associated command to the robot. Snap! also naturally scales to more complex projects.
A dedicated chapter will guide you in what you can do with Snap! and Poppy robots.
Using Python
![]()
Poppy libraries have been written in Python, to allow for fast development and extensibility and to benefit from all existing scientific libraries. Python is also a well-known language and widely used in education or artistic fields. By programming Poppy in Python, you will have access from the very low-level API to the higher levels.
The API has been designed to allow for very fast prototyping. Creating a robot and starting to move motors should not take more than a few lines:
from pypot.creatures import PoppyErgoJr
jr = PoppyErgoJr()
jr.m3.goal_position = 30
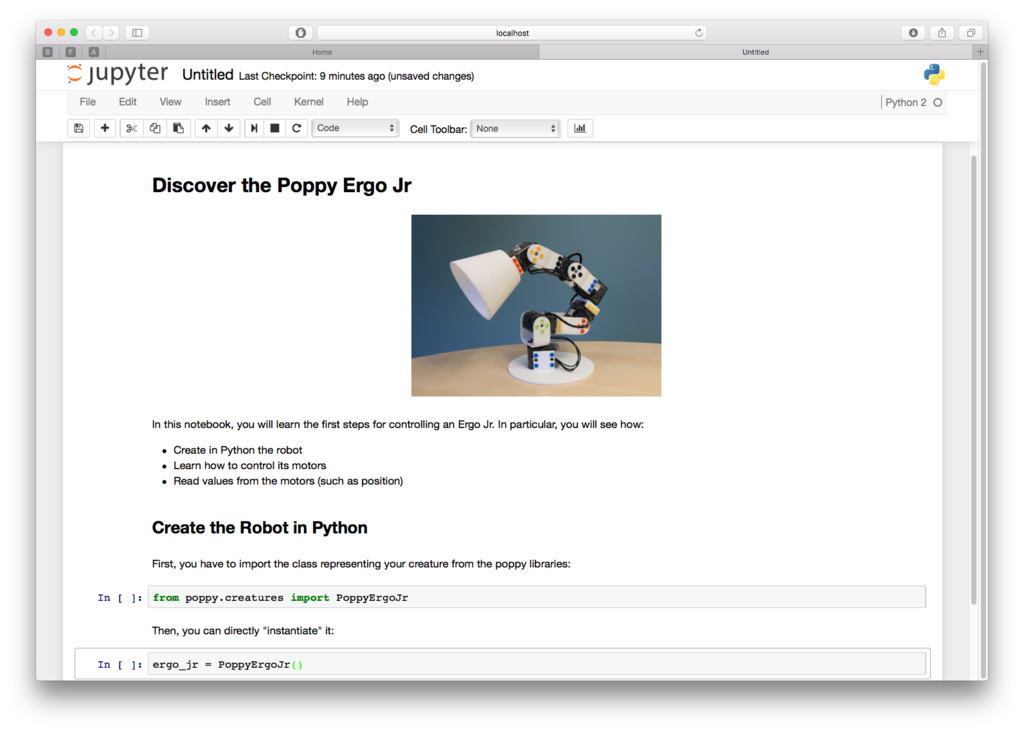
We are also big fan of the Jupyter Project and notebooks. Notebooks are documents which contain both Python code and rich text elements like equations, pictures, videos. They can be edited from the Jupyter Web interface which allow users to program Poppy robots directly from a website hosted on the robot computer. We think that this is a powerful tool permitting the creation and sharing of live code, results visualizations and explanatory text combined in a single document.
![]()
Most of the tutorials, experiments or pedagogical activities that we and the community develop are available as notebooks.
An updated gallery of notebooks can be found here. Contributions welcomed!
Using ROS (Robot Operating System)
For advanced users, Poppy robots can also be used with ROS Noetic. Consult the dedicated chapter.
Through the REST API
On top of the Scratch, Snap!, Python, and ROS options, we wanted to provide another way of accessing and controlling your robot from any device or language. Poppy robots are providing a REST API. The most important features of the robot can be access through HTTP GET/POST requests.
You can find the doc of the REST API here
From a more practical point of view, this allows you to:
- Write bridges to control Poppy robot in any language (awesome contributors have already written Matlab and Ruby wrappers).
- Design web apps connected to your robot, such as the monitor interface (also a contribution!).
- Make your robot interact with other connected devices such as a smartphone, intelligent sensors, or even your twitter account...